Perturbation-based training for motivating gait training paradigms in elderly people
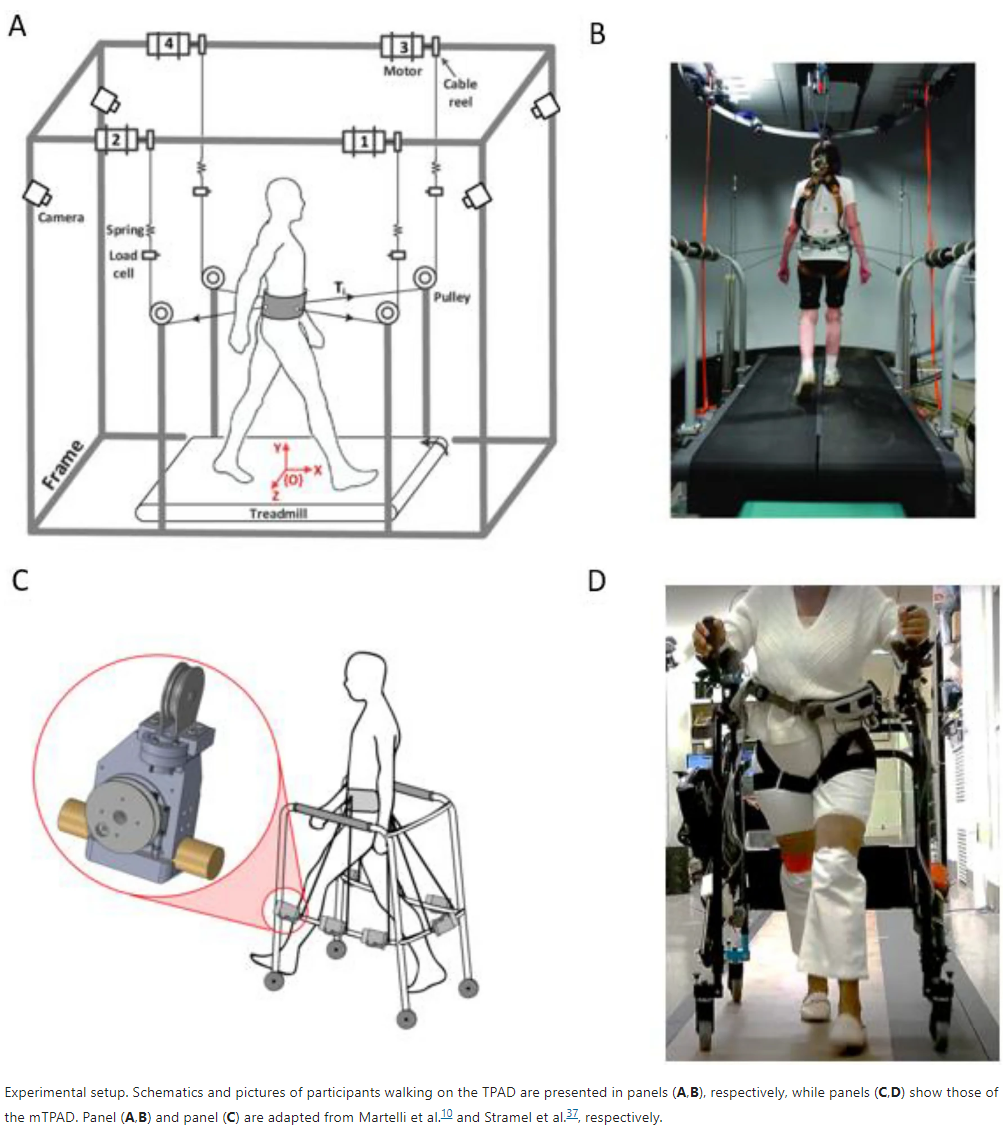
The aim of this research project is to develop gait training paradigms through the application of different types of perturbations while subjects are moving with an assistive walker. By analyzing variations in mobility and stability with changing perturbation regimes, it is envisioned that a mobile task-oriented training system can be created to reduce the rates of high-risk falls for elderly subjects. This project is an extension of the Tethered Pelvic Assist Device (TPAD), and is being conducted with the Columbia University Robotics and Rehabilitation Laboratory, in a multidisciplinary team of researchers ranging from robotics and medical backgrounds. The outcomes and results of this research project were published in Nature’s Scientific Reports here.