
Design of an Actuated Upper Limb Orthosis for Patients with Neurodegenerative Diseases
The project began with an exhaustive literature review of existing orthoses, identifying the present limitations within orthosis design. The modeled orthosis is retractable and can be mounted onto a stationary chair or a wheelchair, and utilizes a series of stepper motors and electromyography sensors along the arm to optimally move the hand towards the desired location.

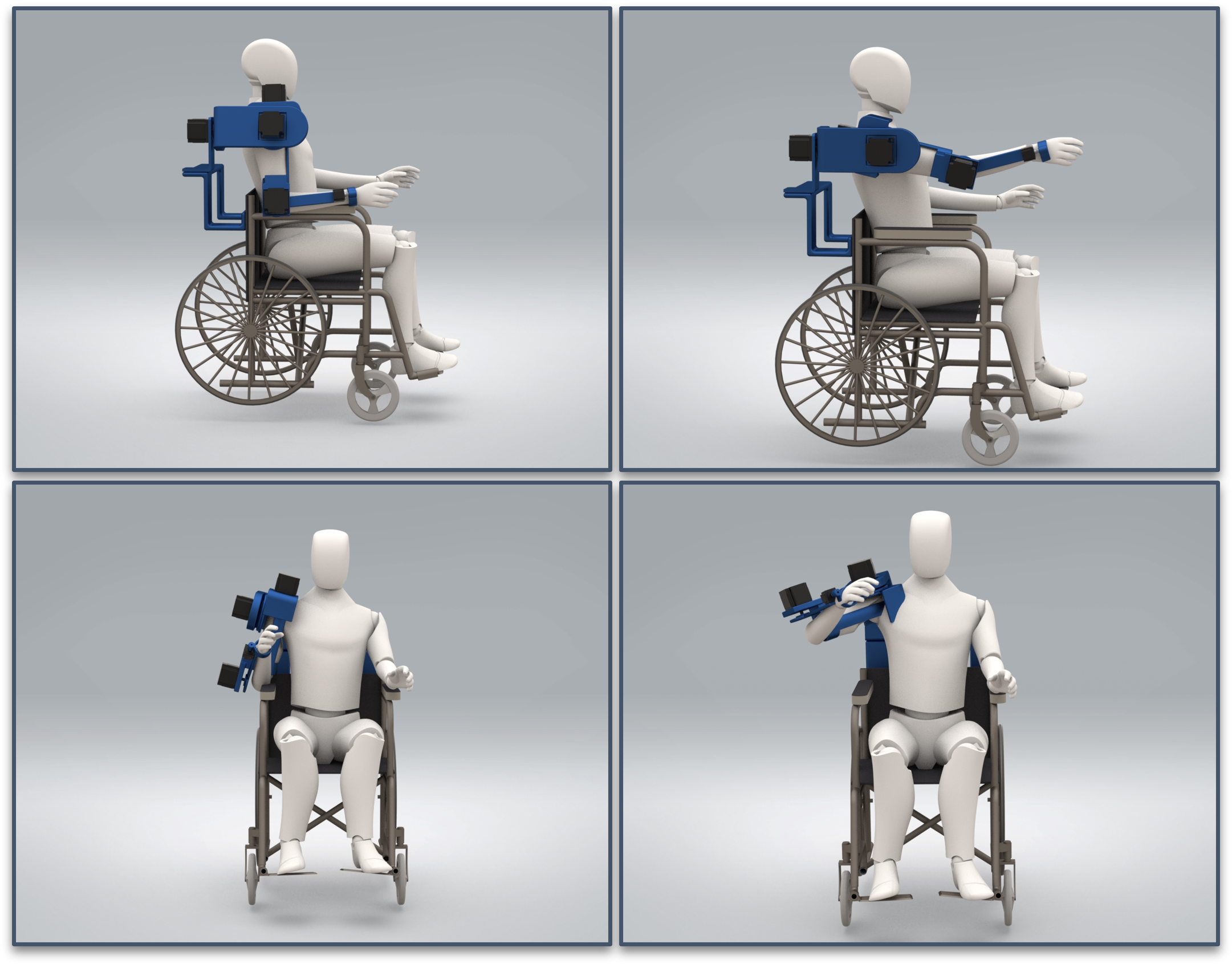
This motion study was broken into two aspects - a forward extension of the arm and a lateral abduction of the arm. This study also included the novel implementation of a robust control scheme to account for random forearm tremors, a common symptom of Parkinson’s disease. Initial simulation through MATLAB found that the control law moved the hand to the desired end-position with a success rate of 93%. Currently, I am working on building a physical orthosis and optimizing the control scheme. You can find our paper here.